http://wiki.cyanogenmod.org/w/Build_for_odroidu2
소스를 git로부터 가져 옵니다.
get source from git.
$repo init -u git://github.com/CyanogenMod/android.git -b cm-10.1
$repo sync
tag를 확인해 보면 M2가 있습니다. M2로 checkout합니다.
[~/projects/cm-10.1/frameworks/base]$ git tag
cm-10.1-M1
cm-10.1-M2
$repo forall -c git chechout cm-10.1-M2
$cd vendor/cm
$./get-prebuilts
$cd ../..
$
source build/envsetup.sh
$
breakfast odroidu2
including vendor/cm/vendorsetup.sh
ls: cannot access device/*/odroidu2/cm.mk: No such file or directory
build/core/product_config.mk:234: *** Cannot locate config makefile for product "cm_odroidu2". Stop.
Device odroidu2 not found. Attempting to retrieve device repository from CyanogenMod Github (http://github.com/CyanogenMod).
Found repository: android_device_hardkernel_odroidu2
Default revision: cm-10.1
Checking branch info
Adding dependency: CyanogenMod/android_device_hardkernel_odroidu2 -> device/hardkernel/odroidu2
Using default branch for android_device_hardkernel_odroidu2
Syncing repository to retrieve project.
remote: Counting objects: 338, done.
remote: Compressing objects: 100% (148/148), done.
remote: Total 338 (delta 147), reused 320 (delta 129)
Receiving objects: 100% (338/338), 2.87 MiB | 153 KiB/s, done.
Resolving deltas: 100% (147/147), done.
From git://github.com/CyanogenMod/android_device_hardkernel_odroidu2
* [new branch] cm-10.1 -> github/cm-10.1
* [new tag] cm-10.1-M2 -> cm-10.1-M2
* [new tag] cm-10.1-M3 -> cm-10.1-M3
* [new tag] cm-10.1.0-RC1 -> cm-10.1.0-RC1
* [new tag] cm-10.1.0-RC2 -> cm-10.1.0-RC2
* [new tag] cm-10.1.0-RC3 -> cm-10.1.0-RC3
* [new tag] cm-10.1.0-RC4 -> cm-10.1.0-RC4
* [new tag] cm-10.1.0-RC5 -> cm-10.1.0-RC5
From git://github.com/CyanogenMod/android_device_hardkernel_odroidu2
* [new tag] cm-10.1-M1 -> cm-10.1-M1
Fetching projects: 100% (1/1), done.
Repository synced!
Looking for dependencies
Adding dependencies to manifest
Adding dependency: CyanogenMod/android_device_hardkernel_samsung -> device/hardkernel/samsung
Using default branch for android_device_hardkernel_samsung
Adding dependency: CyanogenMod/android_hardware_realtek -> hardware/realtek
Using default branch for android_hardware_realtek
Adding dependency: CyanogenMod/hardkernel-kernel-4412 -> kernel/hardkernel/4412-common
Using default branch for hardkernel-kernel-4412
Syncing dependencies
remote: Counting objects: 673, done.
remote: Counting objects: 19, done.
remote: Compressing objects: 100% (15/15), done.
remote: Compressing objects: 100% (315/315), done.
remote: Total 19 (delta 0), reused 19 (delta 0)
Unpacking objects: 100% (19/19), done.
From git://github.com/CyanogenMod/android_hardware_realtek
* [new branch] cm-10.1 -> github/cm-10.1
* [new tag] cm-10.1-M1 -> cm-10.1-M1
* [new tag] cm-10.1-M2 -> cm-10.1-M2
* [new tag] cm-10.1-M3 -> cm-10.1-M3
* [new tag] cm-10.1.0-RC1 -> cm-10.1.0-RC1
* [new tag] cm-10.1.0-RC2 -> cm-10.1.0-RC2
* [new tag] cm-10.1.0-RC3 -> cm-10.1.0-RC3
* [new tag] cm-10.1.0-RC4 -> cm-10.1.0-RC4
* [new tag] cm-10.1.0-RC5 -> cm-10.1.0-RC5
remote: Total 673 (delta 326), reused 673 (delta 326)
Receiving objects: 100% (673/673), 3.95 MiB | 94 KiB/s, done.
Resolving deltas: 100% (326/326), done.
From git://github.com/CyanogenMod/android_device_hardkernel_samsung
* [new branch] cm-10.1 -> github/cm-10.1
* [new tag] cm-10.1-M1 -> cm-10.1-M1
* [new tag] cm-10.1-M2 -> cm-10.1-M2
* [new tag] cm-10.1-M3 -> cm-10.1-M3
* [new tag] cm-10.1-MR1 -> cm-10.1-MR1
* [new tag] cm-10.1.0-RC1 -> cm-10.1.0-RC1
* [new tag] cm-10.1.0-RC2 -> cm-10.1.0-RC2
* [new tag] cm-10.1.0-RC3 -> cm-10.1.0-RC3
* [new tag] cm-10.1.0-RC4 -> cm-10.1.0-RC4
* [new tag] cm-10.1.0-RC5 -> cm-10.1.0-RC5
remote: Counting objects: 2114829, done.
remote: Compressing objects: 100% (330292/330292), done.
Receiving objects: 2% (43873/2114829), 16.79 MiB | 131 KiB/s
odroid-u2를 켜고 device/hardkernel/odroidu2/
extract-files.sh을 실행
Turn on odroid-u2 and run shell script.
$sh ./extrac-files.sh
And build.
$source build/envsetup.sh
$breakfast odroidu2
$croot
$brunch odroidu2
http://wiki.cyanogenmod.org/w/Install_CM_for_odroidu2
여기서 CM 복구 이미지를 받습니다.
Download CM Recovery(bootstrap) Image.
http://cmw.cmfs.me/emmc/bootstrap-cm-10.1-20130105-odroidu2.zip
압축을 풀고 eMMC를 PC에 연결 합니다.
Unzip and connect eMMC Module to PC.
sh ./install-emmc.sh /dev/sd[x] 와 같이 mount된 eMMC의 sd[x]를 넣어 줍니다.
[~/Downloads/cyanogenMod]$ sh ./install-emmc.sh /dev/sdd
/dev/sdd reader is identified.
Fusing kernel
2887260+0 records in
2887260+0 records out
2887260 bytes (2.9 MB) copied, 2.15934 s, 1.3 MB/s
Fusing root filesystem
185013+0 records in
185013+0 records out
185013 bytes (185 kB) copied, 0.203257 s, 910 kB/s
Fusing main system partition
500+0 records in
500+0 records out
524288000 bytes (524 MB) copied, 37.0214 s, 14.2 MB/s
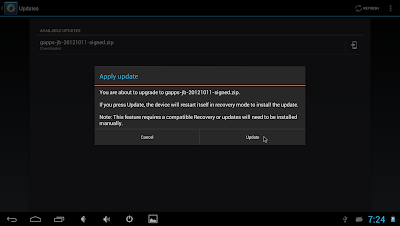
eMMC를 다시 PC에 연결 후 fat 영역에 "
cmupdater" 란 폴더를 만들고 cm-10.1-xxxxxxxx-UNOFFICIAL-odroidu2.zip 앞에서 build된 zip 파일을 넣으면 아래와 같이 보이고 설치가 가능합니다.
finished fusing, reconnect eMMC module.
make directory "cmupdater" into fat partition.
copy cm-10.1-xxxxxxxx-UNOFFICIAL-odroidu2.zip.